
HI-SEAS: The Hawai‘i Space Exploration Analog and Simulation
The Hawai‘i Space Exploration Analog and Simulation (HI-SEAS) is a Mars and Moon exploration analog research station, currently operated by the International MoonBase Alliance.
Located approximately 8,200 feet above sea level, the HI-SEAS habitat is a 1,200 square foot dome located on a Mars-like site on the Mauna Loa volcano on Hawai‘i Island. HI-SEAS has been the home to five successful long-duration (4 to 12 month) NASA Mars simulation missions and tens of other analog space missions in collaboration with multiple space agencies, companies, and organizations worldwide.
(Banner Image: A SENSORIA M3 crew member on a night moonwalk, taken by Epic Tours)
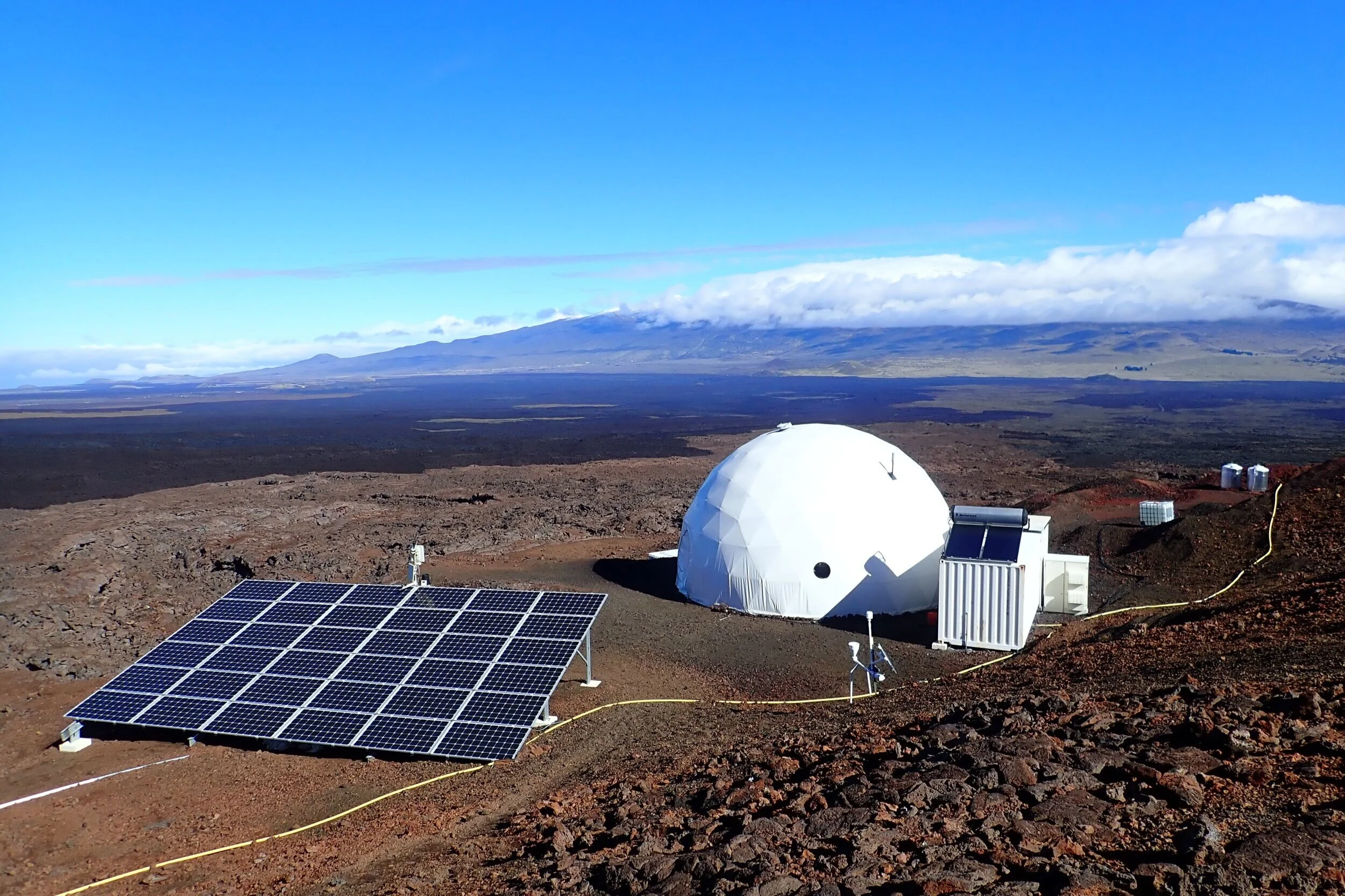

PHOTO: Michaela Musilova/HI-SEAS
From missions for NASA to new ventures for the International MoonBase Alliance, see what’s ahead.

PHOTO: Michaela Musilova/HI-SEAS
Interested in speaking with a HI-SEAS rep about signing up for the next mission?
“…Through our forced isolation the true extent of our interconnectedness and reliance on one another is exposed. Maybe it will help clear some paths to make all kinds of things better—both personally and socioeconomically—in the future. We are all part of something historic and larger than ourselves.”
